Task Accomplishing Systems from Composable Kits
(TASCK)
TASCK provides the framework needed to create on-demand robotics tailored to a particular task in real-time.
Enables the rapid creation of highly customized, on-demand robotic capability.
Virtually simulate and evaluate before you build.
Easily model many variations of robot design. Automatically, virtually evaluate this design space to find the best design for a desired application scenario.
This material is based upon work supported by the DARPA - Tactical Technical Office under Contract No. HR001117C0080. The views, opinions, and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views or policies of the Department of Defense or the U.S. Government.
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited). If you have any questions, please contact the Public Release Center: DARPA Public Release Center (PRC), 675 N. Randolph Street, Room 03-028, Arlington, VA 22203-1714
Commercial
TASCK will lower the cost-of-entry for smaller businesses (manufacturing, warehouses) to design and deploy custom robotic systems that meet their immediate needs in a cost-effective, efficient, and sustainable manner.
Military
TASCK will provide the framework needed to create on-demand, in-theater custom robotics, allowing soldiers with minimal robotics training to rapidly construct working exploration or IED disposal robots.

The Problem
Traditional robots are specialized, one-and-done machines designed to complete a specific task. However, changing labor markets and the rise of asymmetric warfare and international terrorism have created a strong demand for flexible, on-demand robotics systems in both commercial and military applications.
Unfortunately, while robotics hardware has advanced significantly, robotics software and system integration capabilities have lagged behind. A major advancement in the robotics software ecosystem has been ROS (Robot Operating System), which implements a common communications framework, a growing library of reusable software packages, and numerous utilities to aid robot design. ROS, however, does not adequately address complex physical-behavioral architectures, behavior composition, and optimization of custom designs.
Robotics systems consist of tightly-coupled physical (hardware) and behavioral (software) systems and subsystems. As a result, designing and integrating a custom robotics system typically involves a large amount of hand-tuning of physical architecture and software as well as a large amount of knowledge over a range of subjects (math, kinematics, programming, mechanics, etc…).
In short, creating a new robot is an expensive, time-consuming, and frustrating process that requires trained robotics/software specialists who are in short supply. The small business owner cannot afford to hire two full-time robotics engineers for 1-2 years to design and build a robot that he needs to start working in less than 2 weeks. The soldier in the field does not want to carry around and maintain a 40 lb. robot (“dead weight”) that can only do one thing and that cannot be customized.
A Model-Based Composable Robotics Approach
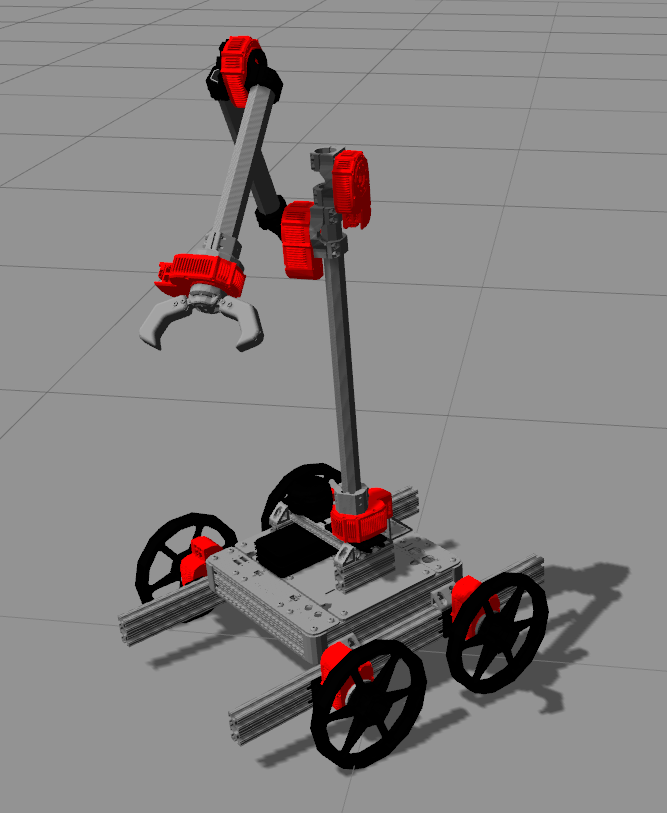
Starting with the OpenMETA platform and HEBI Robotics’s modular hardware system, we are developing a set of software tools, models, and hardware that enables non-expert users to rapidly compose, modify, simulate, and build realistic, cost-effective robotics systems on-demand.
We do this by creating libraries of parametric and interchangeable physical (hardware) and behavioral (software) components that can be combined into hybrid physical-behavioral subsystems and systems. These models express both physical and behavioral properties and can be used to automatically generate both simulation and run-time artifacts. These multi-domain models enable non-expert users to intuitively connect blocks, change parameters, and generate realistic simulations.





Current iterations include a physical component library of HEBI hardware + some common off-the-shelf hardware (e.g. Xbox Kinect, RPLIDAR, 80/20 extruded aluminum), a behavioral component library of ROS nodes (e.g. hexapodmovebase.py, hector_mapping, balance.py), and hybrid subsystems and subsystems built from these atomic components. Future plans include expanding this library with hardware from other vendors as well as allowing users to import their own hardware models and ROS packages.
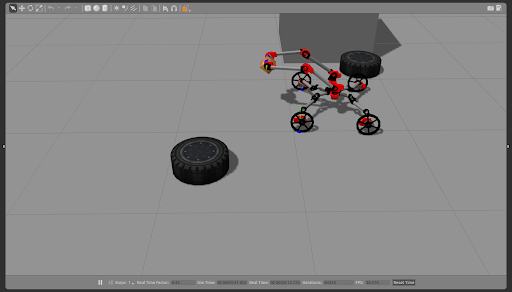
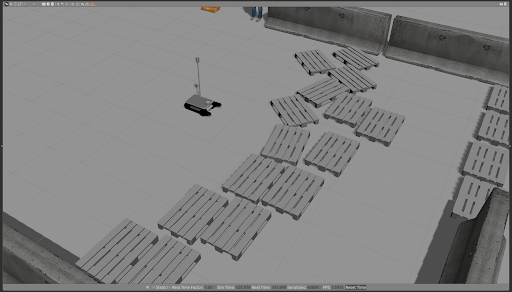
Model interpreters allow the user to automatically generate simulation and run-time artifacts (CAD meshes, URDF files, ROS Launch files) from a composed design allowing for that design to be immediately simulated in the Gazebo Simulator. Future plans include adding support for other simulators/FEA on an as-needed basis.
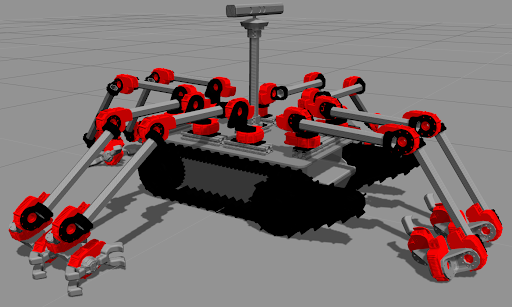
An advanced user can express discrete design choices (e.g. 2-DOF vs 3-DOF legs, X5-1 vs X8-3 rotational actuators) with the models or create integrated design and optimization workflows to automatically generate, simulate, and analyze thousands of designs by varying physical (e.g. leg length, mount angle) and behavioral (e.g. Kp gain, step period) parameters.
…enables non-expert users to rapidly compose, modify, simulate, and build realistic, cost-effective robotics systems…